Tesla 近期在新款的产品中使用升级版的自动驾驶硬件平台,相较初期版本具备更进阶的自动驾驶技术,稍早 Tesla 官方讨论版内有人将 2016 年 12 月出厂的 Model S 60 位于助手席手套箱内部的自动驾驶核心取出,并一探其架构设计;从先前 Tesla 首席执行官 Elon Musk 与 NVIDIA 首席执行官黄仁勋的交情,其实使用 NVIDIA的 Drive PX 自动驾驶平台并不让人意外,不过 Drive PX 也有多种产品线与搭配组合,像是 Audi 的自动驾驶平台甚至是 NVIDIA 作为运算核心、 Mobileye 作为影像加速处理架构的方式,那 Tesla 使用到哪一个层级呢?
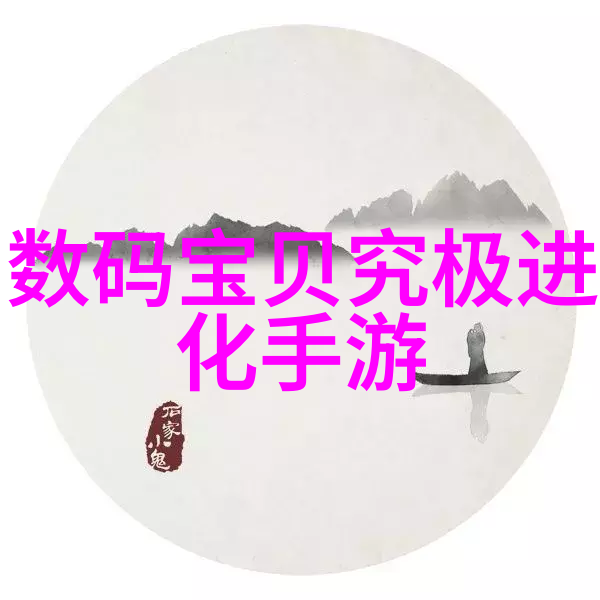
从照片来看, Tesla 目前的自动驾驶运算核心使用的是介于于 NVIDIA Drive PX2 自动巡航版与 Drive PX2 自动驾驶版之间的版本,或者可说是半个 Drive PX2 自动驾驶版的自定义版本,为何这么说呢? NVIDIA参考设计当中, Drive PX2 自动驾驶版直接使用 Tegra Parker 作为自动巡航的演算核心,以其 10W TDP 提供自动巡航所需的 HD 图资以及基本的高速公路巡航应用,而 Drive PX2 自动驾驶版则透过双 Tegra Parker 搭配双 NVIDIA GTX1060 等级( GP106 )核心,号称可达至少 Level 4以上的自动驾驶能力,但 TDP 也攀升到 250W ;而电路板上可看见 Tesla 使用 MXM 模组型的 GP106 搭配单一颗 Tegra Parker (右侧散热片下方)构成运算核心。
为何 Tesla会使用折衷的方式而不是直接使用 Drive PX2 自动驾驶版本?主要的可能性还是考虑功耗、发热与整体性能,毕竟 Tesla 是一台高度仰赖电力的纯电动车,作为自动驾驶平台也是要尽可能降低电力的消耗,虽然仅 10W TDP 的 Drive PX2 巡航版本能够具备基本的高速公路巡航自动驾驶,但这样的功能也是不少高阶车款都已经具备的性能,可是 250W TDP 的 Drive PX2 又过于耗电,就直接使用折衷的作法换取相较市场多数市售车更强的自动驾驶算力。
而 GPU 使用 MXM 模组的原因可能有两种,包括后续维护以及持续升级两种可能性,后续维护当然是考虑到毕竟这是高精密电子产品,万一将 GPU 与 Tegra SoC 直接焊接在主板上,万一其中一部分毁损,等同整个模组都需要置换,其次是 GPU 的复杂度、发热等都比 Tegra SoC 来的高,而车辆本身又处于高度温湿度环境变化的状况,相对故障的可能性也高一些;其次就是 Tegra 也可能仰赖下一代 GPU 推出后,借由替换 MXM 模组就可再次提升算力(或是降低功耗),同时维持既有的单一 Tegra Parker SoC 搭配,可暂缓导入 Tegra Xavier 的时间点,毕竟从新芯片到验证可靠性不可能那么快,替换新架构 GPU 也能作为过渡期的解决方法。
不过 Tesla 也不打算一直仰赖 NVIDIA 的解决方案,他们挖脚了 AMD 出身的传奇架构师 Jim Killer (当前 AMD Zen CPU 架构, AMD 最辉煌的 K7 与 K8 架构皆出自其手)作为自动驾驶解决方案的开发者,而他在 Tesla 的工作极有可能是主导自主自动驾驶芯片架构设计,只是这需要时间酝酿发酵,毕竟若要达到 Tesla 的要求,至少在整体算力方面不能低于目前的 NVIDIA Drive PX 2 的性能 ,同时还要考虑整体功耗的问题。
新闻与图片来源: Electrek , Tesla